|
Qingpo Wuwu Hi! I am a Ph.D. student in Computer Science at Peking University, advised by Prof. Shanghang Zhang and Prof. Huizhu Jia. My research interests lie at the intersection of 3D reconstruction, embodied AI, and physics-informed simulation. I aim to bridge the gap between perception and action by integrating geometric understanding into world models and vision-language-action (VLA) models, ultimately empowering embodied agents to reason about and manipulate the real-world environment. Prior to joining the integrated M.Sc./Ph.D. program at Peking University in 2022, I started my undergraduate studies in Physics at Imperial College London in 2019 and concurrently pursued a second B.Sc. in Computer Science at Goldsmiths, University of London starting in 2020. I am currently looking for research internship positions related to Embodied AI and world models. I am also keen to collaborate on exciting projects at the intersection of vision, physics, and robotics—feel free to contact me! |

|
Education |
Graduate |

|
Peking University, Beijing, China
Integrated M.Sc./Ph.D. in Computer Science Sep. 2022 – Present |
Undergraduate |

|
Imperial College London
B.Sc. in Physics 2019 – 2022 |
|
Goldsmiths, University of London
B.Sc. in Computer Science 2020 – 2025 |
Publications |
VLA & World Model▾ |
|
MV-WAM: Manifold-Aware World Action Model with Value Augmentation
Jintao Chen†, Peidong Jia†, Qingpo Wuwu†, Jiaming Liu, Mengfei Du, Chun-Kai Fan, Xiaowei Chi, Hao Chen, Chengyu Bai, Zezhong Qian, Hao Wang, Jiajun Cao, Weishi Mi, Xiaozhu Ju, Jian Tang, Shanghang Zhang Arxiv Paper A manifold-aware world action model with value augmentation for end-to-end robotic manipulation. |
|
Lift3D-VLA: Lifting VLA Models to 3D Geometry and Dynamics-Aware Manipulation
Jiaming Liu†, Qingpo Wuwu†, Nuowei Han†, Hao Chen†, Zhuoyang Liu, Fan Fei, Yueru Jia, Chenyang Gu, Yandong Guo, Boxin Shi, Shanghang Zhang TPAMI, 2026 · Under Review Paper / Page A 3D-aware framework that lifts geometric and dynamics priors into VLA models for robotic manipulation. |
|
ManualVLA: A Unified VLA Model for Chain-of-Thought Manual Generation and Robotic Manipulation
Chenyang Gu†, Jiaming Liu†, Hao Chen†, Runzhong Huang†, Qingpo Wuwu, Zhuoyang Liu, Xiaoqi Li, Ying Li, Renrui Zhang, Peng Jia, Pheng-Ann Heng, Shanghang Zhang CVPR, 2026 Paper / Page |
|
WoW: Towards a World Omniscient World Model Through Embodied Interaction
Xiaowei Chi†, Peidong Jia†, Chun-Kai Fan†, Xiaozhu Ju†, Weishi Mi†, Kevin Zhang, Zhiyuan Qin, Wanxin Tian, Kuangzhi Ge, Hao Li, Zezhong Qian, Anthony Chen, ..., Yong Dai, Qingpo Wuwu, Chengyu Bai, ..., Yike Guo, Shanghang Zhang, Jian Tang arXiv, 2025 Paper |
|
Wow, Wo, Val! A Comprehensive Embodied World Model Evaluation Turing Test
Chun-Kai Fan†, Xiaowei Chi†, Xiaozhu Ju, Hao Li, Yong Bao, ..., Weishi Mi, Qingpo Wuwu, Peidong Jia, ..., Yike Guo, Shanghang Zhang, Jian Tang arXiv, 2025 Paper |
Neural Rendering▾ |

|
SparseStreet: Sparse Gaussian Splatting for Real-Time Street Scene Simulation
Qingpo Wuwu, Xiaobao Wei, Peng Chen, Nan Huang, Zhongyu Zhao, Hao Wang, Ming Lu, Ningning Ma, Shanghang Zhang ACM ICMR, 2026 Page A compression framework for street scene Gaussian Splatting enabling real-time rendering. |
|
EMD: Explicit Motion Modeling for High-Quality Street Gaussian Splatting
Xiaobao Wei†, Qingpo Wuwu†, Zhongyu Zhao, Zhuangzhe Wu, Nan Huang, Ming Lu, Ningning Ma, Shanghang Zhang ICCV, 2025 Paper / Page Explicit motion decomposition for dynamic street scene reconstruction with 3D Gaussian Splatting. |
|
Implicit Neural Image Field for Biological Microscopy Image Compression
Gaole Dai, Rongyu Zhang†, Qingpo Wuwu†, Cheng-Ching Tseng†, Shaokang Wang†, Ming Lu, Tiejun Huang, Yu Zhou, Ali Ata Tuz, Matthias Gunzer, Jianxu Chen, Shanghang Zhang Nature Computational Science, 2025 Paper / Page Implicit neural representations for high-fidelity compression of large-scale biological microscopy images. |
|
MixedGaussianAvatar: Realistically and Geometrically Accurate Head Avatar via Mixed 2D-3D Gaussians
Peng Chen, Xiaobao Wei, Qingpo Wuwu, Xinyi Wang, Xingyu Xiao, Ming Lu ACM MM, 2025 Paper |
|
RoboArmGS: High-Quality Robotic Arm Splatting via Bézier Curve Refinement
Hao Wang, Xiaobao Wei, Ying Li, Qingpo Wuwu, Dianxi Wu, Jiahao Cao, Ming Lu, Wenzhao Zheng, Shanghang Zhang arXiv, 2025 Paper |
|
OmniIndoor3D: Comprehensive Indoor 3D Reconstruction
Xiaobao Wei, Xiaoan Zhang, Hao Wang, Qingpo Wuwu, Ming Lu, Wenzhao Zheng, Shanghang Zhang arXiv, 2025 Paper |
Physics-Informed Simulation▾ |
|
PINNsAgent: Automated PDE Surrogation with Large Language Models
Qingpo Wuwu†, Chonghan Gao†, Tianyu Chen, Yihang Huang, Yuekai Zhang, Jianing Wang, Jianxin Li, Haoyi Zhou, Shanghang Zhang ICML, 2025 Paper An LLM-based agent framework for automating physics-informed neural network surrogation of partial differential equations. |
|
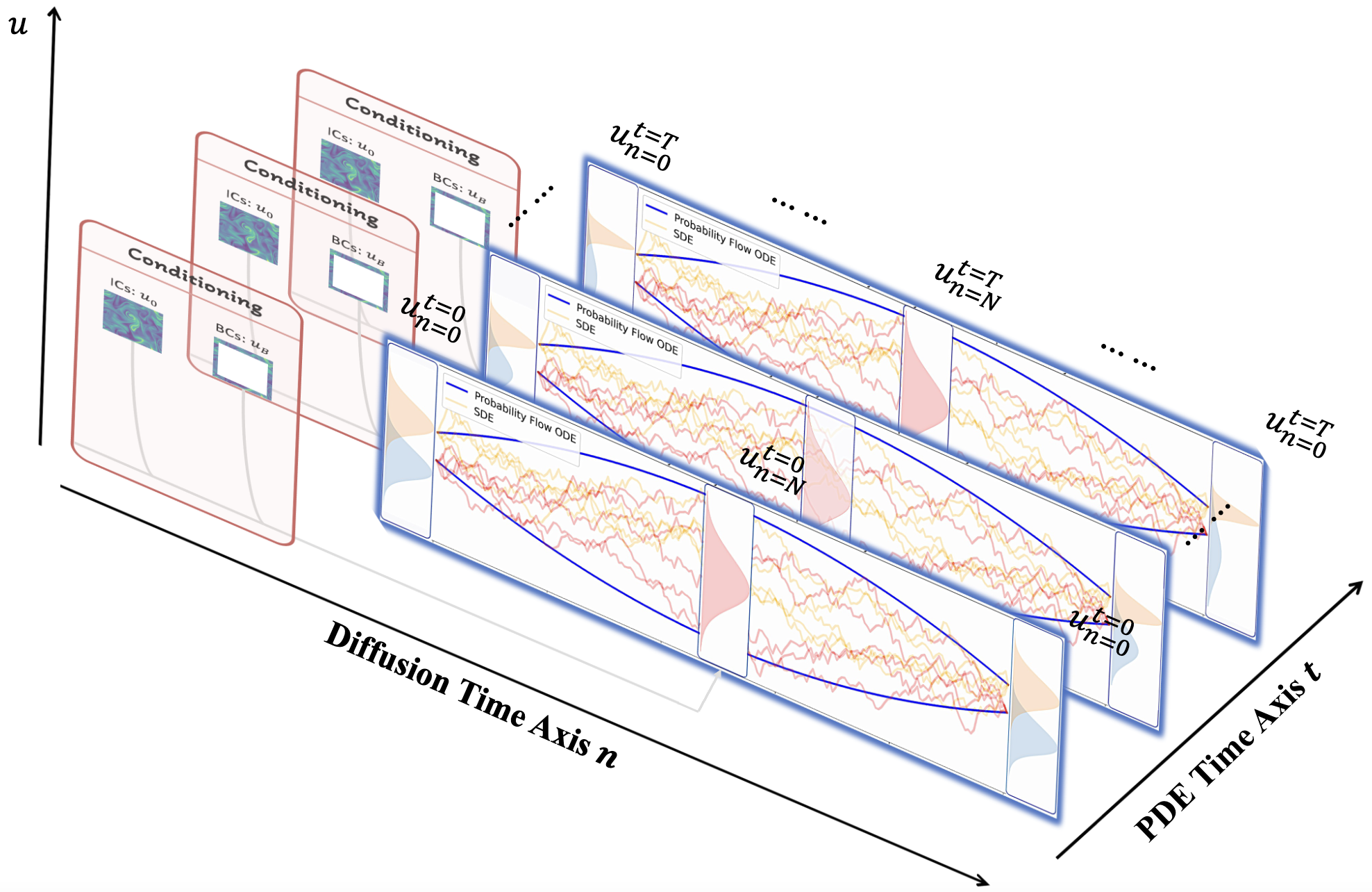
PDEffusion: Solving Equations with the Physics-Grounding Diffusion Model
Chonghan Gao, Haoyi Zhou, Wenxin Gong, Qingpo Wuwu, Tianyu Chen, Qian Yu, Shanghang Zhang, Jianxin Li IEEE BigData, 2025 Paper |
Work Experience |

|
Research Intern, Simplexity Robotics — Embodied AI
Sep. 2025 – Present · Beijing, China
|

|
Research Intern, X-Humanoid — World Model
Jul. 2025 – Sep. 2025 · Beijing, China
|
|
Research Intern, NIO Co., Ltd. — 3D Reconstruction Division
Aug. 2024 – Aug. 2025 · Beijing, China
|
Awards & Grants |
| 2026: NSFC Research Fund for PhD Students (PI: Qingpo Wuwu) — Adaptive 3D Scene Representation Learning for Embodied AI Applications |
| 2017: National High School Physics Competition — 13th place |
| 2017: Provincial High School Physics Competition — 3rd place |
|
Template from Jon Barron. |